
RG ガンダム その11
今日は「RG ガンダム」の肩アーマーなどの組み立てを行ないました。

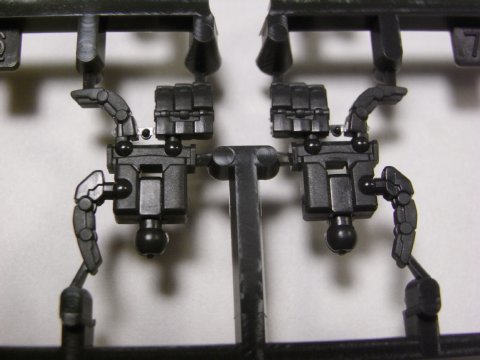
写真は「RG ガンダム」の肩アーマー(片側分)のパーツです。
こうしてみると肩アーマーはMG同様に、内部にフレームを持つ構造になっています。

肩アーマーを組み立てたところです。
ここも例によって、3色の白パーツが使われています。

ということで、写真の「RG ガンダム」に肩アーマーを取り付けると...

こんなカンジになりました!
うーむ、肩アーマーのがあるとないとでは随分と印象が代わりますね。
(当然あるほうがカッコいいですよね^^;)
さて、写真では握り手の固定タイプのマニピュレータとなっていますが、実はこの「RG ガンダム」には、もう一種類マニピュレータが付いています。
で、そのマニピュレータのパーツはアドヴァンスドMSジョイントのランナーに写真の状態で付いています。(やはりこれも片手で1パーツです。)このパーツを組み立てると...

写真のような状態になりました。
このマニピュレータ、パッと見では指の付け根部分が1箇所だけ可動するようにも見えますが実は...

写真のようにさらにもう一箇所可動するようになっています。
最初ここが曲がったときには、「もしかしてパーツが歪んだ?」と思いましたが、よーく観察してみるとここは、可動部だったようで全ての指の同じ部分が可動するようになっているのでした。

手首関節は写真のように90度曲がります。また各指が割と自由に動くので写真のようなポーズも可能です。
しかし、1/144スケールでMGと同じような可動が再現できているのはスゴイですね。

肩アーマーと可動式のマニピュレータを取り付けたところです。
マニピュレータは固定式を使う理由は特に無さそうなので、おそらくずっとこの可動式を採用することになりそうです。

さて、あとはバックパックを取り付ければ、本体の組み立ては完了です。
















Anonymous (04/19)
Anonymous (04/19)
Anonymous (04/19)
Anonymous (04/19)
Anonymous (04/19)
tkt0314 (04/18)
スミ入れマーカー (04/18)
Anonymous (04/18)