
RG フリーダムガンダム その4
RG フリーダムガンダム
@ 2011年12月 2日
今日は「RG フリーダムガンダム」の腕フレームの組み立てを行いました。
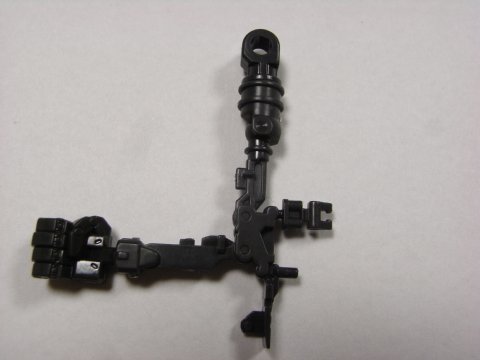
写真は、腕部のフレームパーツです。
例によって腕部もこの1パーツから構成されていて...

パーツを回転させて、シリンダー部分を所定の位置にハメ込むと写真のようになります。
なお、パーツに付いている握り手のマニピュレータは、いったん外すようになっていますが、可動式のマニピュレータが別に付いている出番はなさそうです。

写真はヒジ関節を曲げたところです。
この小ささで前腕と上腕のシリンダーがヒジの可動に連動して動くのは、なかなかよく出来ていますね。

で、こちらが可動式のマニピュレータです。
アドヴァンスドMSジョイントに右側の状態で付いているパーツを変形すると、左側のマニピュレータとなります。(今回はじめて、白いパーツを使いました。)

これで腕まで付いて、アドヴァンスドMSジョイント部分の組み立ては完了です!

上半身のアップです。
いやぁ、パーツは少ないのにこれだけ複雑なフレームになっているのは、なかなかスゴイですね。

さて、これでフレームは一応全体が繋がったわけですが、取説のフレーム状態の写真ではいくつかの普通のランナーのパーツが付いた状態となっています。ということで、次回は、もう少し追加でパーツを取り付けてフレームの完成度を上げたいと思います。
















Anonymous (04/19)
Anonymous (04/19)
Anonymous (04/19)
Anonymous (04/19)
Anonymous (04/19)
tkt0314 (04/18)
スミ入れマーカー (04/18)
Anonymous (04/18)