
RG ガンダムエクシア その2
さて、今日から「RG ガンダムエクシア」の作製開始です。まずはアドヴァンスドMSジョイントの組み立てから...

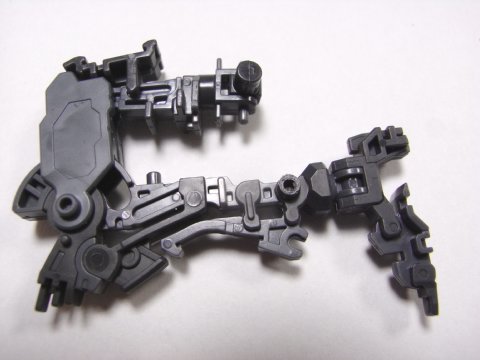
ということで写真は脚部のアドヴァンスドMSジョイントです。
とは言っても実は、写真中央の2つのパーツのみがBランナーで、上下の2つのパーツはFランナーのパーツだったりします。
うーむ、今まで脚はアドヴァンスドMSジョイントだけで繋がっていたのですが、このキットではヒザを他のランナーから持ってこないと脚がつながりません。

それはさておき、これらのパーツを組み立てると写真の脚フレームとなります。
とこれは...ヒザの裏側あたりが円筒形で独特の形状をしてますね。
写真はヒザ関節を曲げたところです。
これを見るとヒザの可動と連動して、腿のパーツがスライドするようになっています。
そして...

足先も写真のようにつま先部分に2箇所可動部分があります。
この可動はRGでは定番ですが、それにしてもよくできてますな。
さて、この足先ですが外装が付かないこの状態だと、横幅がかなり細いので片脚では自立が困難です。
そこで...

両脚を繋げるために写真の腰部のフレームもここで取り付けてしまいましょう!
ちなみに腰部も中央のパーツのみがアドヴァンスドMSジョイントで、上下のパーツはFランナーのパーツとなっています。

腰部を組み立てると写真の状態になります。
これで両側に脚部を取り付けるジョイント部が用意出来たので...

脚部を腰部とドッキングすると、こんなカンジになりました!

脚部だけですがポーズを付けてみました。
このエクシアのフレームは、他のRGに比べるとかなり独特の形状をしています。
ヒザ部分が丸いのは例のレンズ状のパーツが付くからなんでしょうけどね^^;。
それにしても足先が細すぎるので、ポーズを付けての自立が難しいです。これは足の裏側のパーツは早めに取り付けないと...。
















Anonymous (04/19)
Anonymous (04/19)
Anonymous (04/19)
Anonymous (04/19)
Anonymous (04/19)
tkt0314 (04/18)
スミ入れマーカー (04/18)
Anonymous (04/18)