







RG ダブルオークアンタ その4
RG ダブルオークアンタ
@ 2016年6月12日
今日は「RG ダブルオークアンタ」の腕フレームの組み立てを行いました。
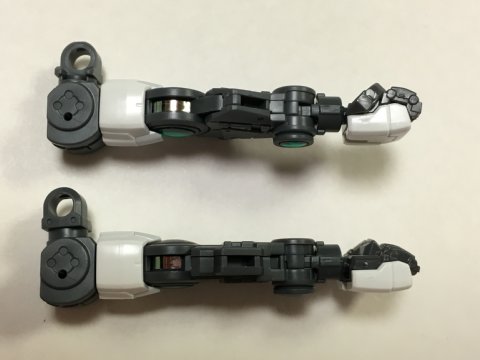
写真は「RG ダブルオークアンタ」の腕フレームです。
この腕フレームですが、アドヴァンスドMSジョイントが使われているのは...
なんと、マニピュレータ部分だけだったりします。
ということで腕フレームは全て、通常のランナーのパーツが使われていることになります。
うーむ、ここまで来ると「アドヴァンスドMSジョイントを組立てるだけでフレームがあっという間に完成!」とはとても言えませんね^^;。
写真は「RG ダブルオークアンタ」の腕フレームを横から見たところです。
とはいえ、フレームにパーツをたくさん使っているだけあって、出来栄えはなかなかです。
さて、気になるヒジの可動はというと...

複数箇所で可動し、写真のところまで曲がります。
腕にもレンズ状のパーツが2箇所に使われていますが、ここがどちらも可動軸になっているのが、違和感が少なくていいですね。
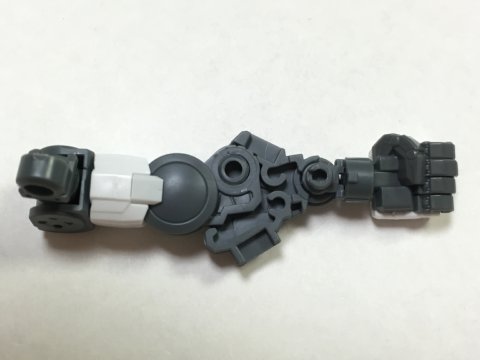
写真は腕フレームの内部構造です。
この状態から...

ヒジ関節は上下の2箇所が可動、そして手首もクリアパーツのところで可動する仕組みとなっています。


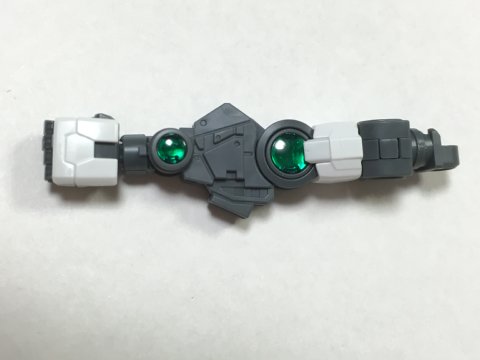
さて、胴体に腕フレームを取り付けると、こんなカンジになりました!

写真はフレームを横から見たところです。
この角度からだと、緑のクリアパーツが縦方向に4つ並んでいるのが見えますが、これだけでダブルオー感?が十分にありますね。
















Anonymous (04/19)
Anonymous (04/19)
Anonymous (04/19)
Anonymous (04/19)
Anonymous (04/19)
tkt0314 (04/18)
スミ入れマーカー (04/18)
Anonymous (04/18)