
RG シナンジュ その3
RG シナンジュ
@ 2016年8月 7日
今日は「RG MSN-06S シナンジュ」の脚フレームの組み立てを行いました。

写真は「RG シナンジュ」の脚部のアドヴァンスドMSジョイントのパーツです。
ほぼこの1パーツだけでフレームが完成する、というのが初期のRGのコンセプトでした。

そして1パーツながらも、写真のように関節は複雑に可動します。
で、今回の「RG シナンジュ」はというと...

脚フレームには、かなりの数のパーツを使います。
まあ、元のパーツがガンダムMK-IIなので、これぐらいパーツを足さないとシナンジュにはならないのでしょうね。
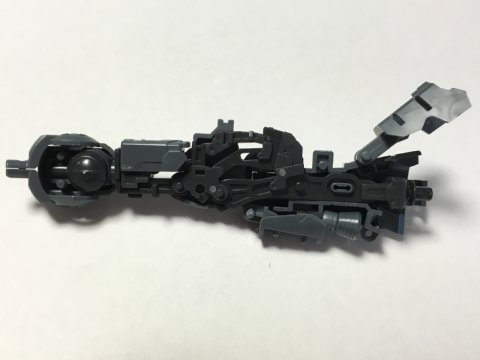
さて、写真は脚フレームの内部構造です。
これを見ると、アドヴァンスドMSジョイントが、各パーツの内部にスッポリと収納されていることがわかります。
また、股関節の軸はもう一段上に、パーツが被さるようになっているため、これで脚の長さも延長されているというわけですね。なるほど!

写真はヒザ関節を曲げたところです。
このあたりの可動の仕組みは、中のアドヴァンスドMSジョイントの機構をそのまま使っているようです。

ということで、脚フレームを組み立てると写真の状態になります。
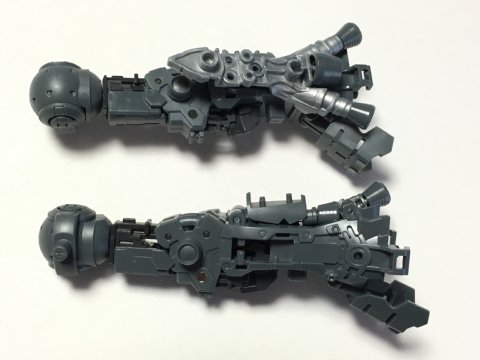
こちらは脚部を横から見たところです。
この状態からヒザを曲げると...

写真のところまで可動します。
ヒザの可動と連動して、腿などのパーツがスライドする機構が付いていますが、このあたりは最近のキットではあまり見かけなくなってきましたね。

さて、脚フレームに足先をドッキングするとこんなカンジになりました!

脚部だけですがポーズを付けてみました。
うーむ、写真ではスケールが分からないので、これはまるでMGのようですね...。
ここまでフレームを再現しているのは、やはりこの「RG シナンジュ」は気合が入ってますね。
















Anonymous (04/19)
Anonymous (04/19)
Anonymous (04/19)
Anonymous (04/19)
Anonymous (04/19)
tkt0314 (04/18)
スミ入れマーカー (04/18)
Anonymous (04/18)